Nous parlons régulièrement de l’utilisation de la réalité augmentée dans le domaine du bâtiment et de la construction. C’est en général lié à la visualisation de la maquette 3D “en situation”, sur un plan masse ou en extérieur, et à la possibilité de tester des paramètres différents comme la lumière ou l’environnement. Mais qu’en est-il de l’utilisation de la réalité augmentée à l’intérieur des bâtiments ? Pour cela il faut pouvoir disposer d’une sorte de GPS indoor suffisamment précis. Nous avons fait le tour des systèmes proposés aujourd’hui.
Revenons sur la définition de notre “GPS indoor”. On parle plus souvent de “indoor location” ou “indoor positioning”. C’est une technologie qui permet de connaître la localisation d’une personne ou d’un produit dans un bâtiment avec plus ou moins de précision. Pour être plus général, nous pouvons parler de localisation indoor dans tous les lieux où les données GPS ne sont pas disponibles. Par exemple dans les usines, les entrepôt, les immeubles, … Pour faire le tour des technologies actuelles, nous vous recommandons l’excellente synthèse du CITC EuraRFID basé à Lille, publiée à l’occasion de conférence « QUID des technologies sans contact au service de la géolocalisation indoor » qui a eu lieu le 9 décembre 2014.
L’usage d’un système de localisation pour faire de la réalité augmentée est complexe pour principalement deux raisons. Le positionnement doit être précis et stable. C’est une condition obligatoire pour créer la sensation d’immersion. C’est particulièrement vrai pour une expérience de réalité augmentée visuelle car, en intérieur, notre cerveau peut se raccrocher à de nombreux points de repères et remarque immédiatement tout décalage. En cas d’imprécision on voit apparaître également de problèmes de perspectives et de points de vue qui casse rapidement l’expérience.
Il existe une seconde contrainte, toujours critique dans le cas de RA visuel, il faut non seulement savoir où est la personne (ou l’appareil) mais également ce qu’elle regarde précisément pour superposer des contenus virtuels en temps réels. On ne peut donc se contenter de coordonnées XYZ.
Voici quelques technologies qui pourraient nous aider à lever ces contraintes. Nous avons choisi de les classer en grandes familles.
L’utilisation d’ondes électromagnétiques
C’est certainement la famille la plus connue puisqu’elle concerne les technologies Wifi, RFID, NFC, BLE, UWB, Zigbee, iBeacons ainsi que la très récente LiFi. Généralement le positionnement est défini par triangulation (repérage de trois balises ou plus) ou par la mesure du caractéristique physique du signal (temps de vol, atténuation, etc.)
Dans un environnement fermé, la difficulté de ces technologies est aux réverbérations multiples des ondes et aux interactions avec les éléments métalliques ou liquides. La précision est fluctuante et dépasse 50 cm. De plus, si certains « tags » comme ceux utilisant le NFC sont assez bon marché, l’infrastructure globale peut vite devenir coûteuse.
A noter également que même sile signal GPS « classique » ne fonctionne pas, il est possible de créer à l’intérieur des bâtiments un constellation de satellites virtuels ou « Pseudolite » pour récréer un signal. Ce sont encore des technologie de laboratoire mais la précision semble assez bonne.
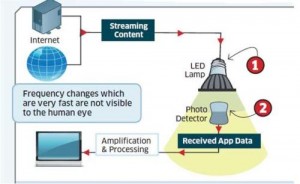
Principe du LiFi (source randco.fr)
Le LiFi sort du lot car il a l’avantage de pouvoir être fortement focalisé. Il n’est de plus pas sensible aux perturbations électromagnétiques et, comme il ne passe pas à travers les murs, diminue les phénomènes d’interférences.
On voit que la précision de ces technologies n’est pas assez forte pour faire de la réalité augmentée visuelle de bonne qualité. Cependant, elles peuvent être efficacement utilisées pour de la RA sonore.
Capteurs internes
Tous les appareils utilisés aujourd’hui pour vivre une expérience de réalité augmentée disposent de capteurs internes assez performants pour aider à estimer les déplacements, comme les accéléromètres ou les boussole. C’est avec ces données que l’on peut estimer un déplacement. On parle alors de « la navigation à l’estime« . Cette technique reste très imprécise car elle dépends à la fois de la faible précision des capteurs embarqués dans les équipements grand public, et de la calibration indispensable (comme la longueur d’un pas).
Bien que clairement inadaptée à une expérience de RA, cette technique peut être utilisée pour « boucher les trous » entre différentes zones couvertes par des technologies de localisation plus précises. En effet, son grand avantage est son faible coût et son utilisation possible dans 100% des smartphones actuels.
Ultrasons
Cette technologie peut répandue peut permettre à une smartphone de se géolocaliser sans connexion particulière. En France la société Stimshop est spécialisée dans son déploiement. Les avantages sont un peu identiques à ceux du LiFi (du point de vue d’une expérience de RA) en moins directif. On reste donc dans une faible précision et l’impossibilité d’utiliser une augmentation visuelle.
Reconnaître visuellement le lieu
La solution la plus classique s’appuie sur une technologie stable et connue. Il suffit de positionner intelligemment les marqueurs pour les fondre dans architecture (les marqueurs peuvent être des images ou des volumes). On peut par exemple utiliser les radiateurs comme dans cette démonstration du Fraunhofer Center for Sustainable Energy Systems à Boston.

FLIR ONE (source flir.com)
Evidemment, il faut pouvoir poser des marqueurs visibles, ce qui n’est, par exemple, pas possible dans un bâtiment historique. Il semble possible d’utiliser des marqueurs émettant dans des longueurs d’ondes non visibles pour l’oeil humain, comme l’infrarouge. Cependant, les capteurs adéquates, comme le FLIR ONE pour iPhone, ne sont pas encore assez répandus.
Il est aujourd’hui possible de travailler sans marqueurs en utilisant les caractéristiques géométriques de la pièce ou du bâtiment. La technologie SLAM présentée par Metaio au cours de InsideAR 2014 ainsi que les produits de la société Cimagine vont dans ce sens. Evidemment pour une position absolue, l’application doit avoir accès à une modélisation 3D de l’ensemble, qui peut être soit directement intégrée, soit transmise par des balises intégrées dans le lieu.
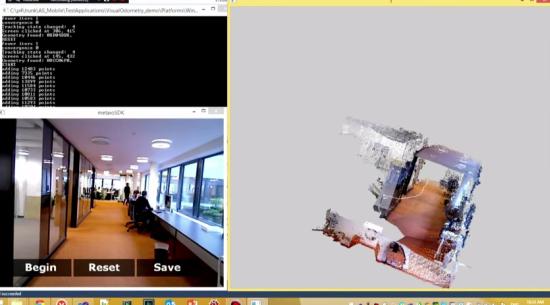
Metaio RGB-D SLAM exemple
Il manque encore un élément à cette technologie très prometteuse, l’information sur la profondeur. On va arriver très vite puisque Metaio propose déjà la technologie RGB-D SLAM où le D est justement la profondeur. Pour la récupérer en même temps que l’image, il faut un capteur spécifique (souvent IR). Plusieurs propositions sont déjà sur le marché comme le « Structure Sensor » de la société Occipital. Google avec son projet « Tango » et Intel avec « Realsens » sont également de la partie. Cette technologie pourra donc créer en direct une maquette numérique 3D de l’environnement et la comparer en temps réel au modèle enregistré (et pourquoi pas l’améliorer).
Dans ces conditions, la précision du positionnement et de l’angle de vue seront au rendez-vous et la réalité augmentée sera tout à fait possible. Le temps de l’intégration des capteurs dans les appareils et de la diffusion dans le grand public, on peut estimer l’apparition massive de cette technologie à 5 ans, soit 2020. Un peu avant peut être en 2017/18 nous verrons des utilisations professionnelles, liées probablement à des appareils de type lunettes ou casque.
Un bilan ?

SAP & Vuzix expérience en entrepôt
Cette synthèse n’est probablement pas exhaustive, mais nous n’avons pas trouvé aujourd’hui de solution miracle pour faire de la « bonne » réalité augmentée visuelle à l’intérieur d’un bâtiment. La seule technologie robuste reste celle de la reconnaissance d’image ou de volume. La situation va probablement évoluer dans les 3 prochaines années avec l’arrivée en masse des capteurs de profondeur.
Pour de la réalité augmentée sonore par contre, les technologies actuelles de repérage de position sont suffisamment précises pour créer des effets étonnants. Le seul bémol peut être le coût de mise en place des capteurs et de leur infrastructure.
Remerciements
Nous sommes très reconnaissant envers les entreprises qui nous ont permis de réaliser cette synthèse. En voici la liste
Littlethumb, Polestar, Oledcomm, Tévolys, La RATP, l’agence DAD

Grégory MAUBON est consultant indépendant en réalité augmentée (animateur et conférencier) depuis 2008, où il a créé www.augmented-reality.fr et fondé en 2010 RA'pro (l'association francophone de promotion de la réalité augmentée). Il a aidé de nombreuses entreprises (dans plusieurs domaines) à définir précisément leurs besoins en réalité augmentée et les a accompagnées dans la mise en œuvre.
[…] Localisation indoor et réalité augmentée : un mariage en vue. Nous parlons régulièrement de l’utilisation de la réalité augmentée dans le domaine du bâtiment et de la construction. […]
[…] supports transparency (“alpha channel”). You can use Adobe's sample video for testing purposes. Localisation indoor et réalité augmentée : un mariage en vue. Nous parlons régulièrement de l’utilisation de la réalité augmentée dans le domaine du […]
Bonjour,
Très interessant.
Effectivement cela semble interessant dans des activités de préparation de commandes en entrepot par exemple, mais finalement c’est extrapolable à toutes activités où l’on souhaite diffuser des informations différentes en fonction de la position occupée dans un espace fermé.
PhG
PS: message pour le webmaster, dans les remerciements concernant la société de transport parisien, le lien pointe bien sur le site, mais il y a un petit cafouillage (avec un effet comique certain) dans l’ordre des lettres …le P et le T sont inversés.
[…] vous rattraper ! La période de Noël et du Nouvel an est souvent synonyme d'actualité ralentie. Localisation indoor et réalité augmentée : un mariage en vue. Nous parlons régulièrement de l’utilisation de la réalité augmentée dans le domaine du […]
Hello 🙂 Je consultais les liens et technologies présentées, et cela m’a fait penser à une société que j’ai vu passer dans l’actualité en début d’année. Sysnav. Je ne sais pas si vous connaissiez, et je ne crois pas avoir vu mention d’un développement de géoloc indoor, mais cela semble être clairement possible, sans infra particulière. Quelques liens relatifs :
=> http://business.lesechos.fr/entrepreneurs/innovation-recherche/dossiers/MIT-top-10-innovateurs/david-vissiere-sysnav-revolutionne-la-geolocalisation-62546.php
=> http://www.lefigaro.fr/entrepreneur/2014/04/13/09007-20140413ARTFIG00031-ce-francais-va-revolutionner-nos-gps.php
=> http://www.dailymotion.com/sysnav
Vous en aviez entendu parler ?
Bonjour,
C’est une technologie intéressante que je ne connaissais pas. Cela ressemble par contre beaucoup à la technique de « navigation à l’estime » dont je parle dans l’article. D’après les spécialistes que j’ai contacté, elle est loin d’être précise car très liée aux capteurs des appareils utilisés. DE plus les champs magnétiques dans les bâtiments semblent être très perturbés pas la présence humaine, que qui complique encore leur utilisation.
J’attends donc de voir une expérimentation réel pour juger de la technologie 🙂
Grégory
[…] => Localisation indoor et réalité augmentée : un mariage en vue ? . 22/12/2014. «Pour cela il faut pouvoir disposer d’une sorte de GPS indoor suffisamment précis. Nous avons fait le tour des systèmes proposés aujourd’hui. (…).» Source : http://www.augmented-reality.fr/2014/12/localisation-indoor-et-realite-augmentee-un-mariage-en-vue/ […]
[…] Localisation indoor et réalité augmentée : un mariage en vue. Nous parlons régulièrement de l’utilisation de la réalité augmentée dans le domaine du bâtiment et de la construction. […]